
Todo el mundo que tenga una impresora 3D ha oído hablar de los motores paso a paso, pero, cuando te metes un poco más te empiezas a preguntar ¿Cuál comprar? ¿Cómo funcionan por dentro? ¿Por qué se usan los Nema 17?
Por esta razón me he propuesto propuesto preparar una completa guía sobre los motores paso a paso con un enfoque más práctico y útil.
Además voy a enumerar una lista de trucos y de consejos reales que pueden servirte para saber qué motor paso a paso comprar, o descubrir qué tipo de motor lleva esa impresora vieja, o cómo cablear los motores.
Cógete un cafecito cargado ☕ o una cerveza fresquita 🍺 que…
Comenzamoooooooooooooo😮😮😮😮😮😮ooooooooooooooooooooooooooos
🤔 Motores paso a paso, qué son y para qué sirven
Seguramente ya sabrás qué es un motor paso a paso. Lo habrás escuchado miles de veces, y segur oque ya tienes alguno, sobre todo si has montado una impresora 3D, pero aun así, vamos a empezar por lo más básico: ¿Por qué quiero usar un motor paso a paso?.
La respuesta rápida es porque son los motores que permiten tener precisión y control de todos sus movimientos.
Y es por esto por lo que se utilizan en robots, máquinas o impresoras 3D. Los motores paso a paso están presentes en la mayoría de los proyectos de robótica.

Los puedes ver nombrados como «motores stepper» porque los pasos en inglés se traducen como «steps». Asi que estos motores se llaman motores steppers, o simplemente steppers.
También es muy habitual llamarlos Motores PaP (de motores paso a paso) y durante este post usaremos todos estos nombres indistintamente.
Con este tipo de motores podremos mantener un control preciso del movimiento desde un Arduino, o desde un ordenador, podremos ordenarle a la máquina que se mueva exactamente unos milímetros. Veamos cómo funcionan para que podamos aprovechar mejor sus ventajas.
🦴 ¿Cómo funciona un motor paso a paso?
Los motores paso a paso se componen de dos partes:
- La primera es el estator que es donde se encuentran las bobinas y es la parte que no se mueve. Mirado en detalle pueden verse unas muescas que van a quedar imantadas cuando circule la corriente por el interior de las bobinas.
- Por otro lado, la parte que gira se llama rotor, y está formado por unos imanes que se alternan entre norte/sur. Hay tantos imanes como muescas en el estator.

La idea fundamental es que: cuando se imantan las bobinas, los imanes se sienten atraídos por las muescas.
En las siguientes imágenes puede verse el funcionamiento interno. Cuando la bobina queda imantada hacia el polo sur, los dientes imantados al norte del estator quedan atraídos. El motor queda firme en su posición.

Cuando la bobina queda imantada hacia el polo norte, los dientes imantados al norte del estator se repelen, mientras que los atraen los del sur y el motor avanza un paso.

En este video lo explican estupendamente, échale un ojo.
👟 Ventajas de los motores paso a paso
Estas son las ventajas más importantes que tienes que tener en cuenta en tu proyecto si vas a usar motores stepper.
👍🏻 Control de la posición
Los motores paso a paso necesitan de un circuito digital para moverse: Normalmente una placa como Arduino o un controlador más avanzado, pero no es posible hacer un circuito ‘simple’ para mover un motor stepper.
Nuestro programa envía exactamente los pasos que queremos y sabemos, en consecuencia, exactamente el ángulo que va a girar el motor.
Si la electrónica que estamos usando mantiene (de forma simultánea) el control preciso de la posición de todos los motores podemos hacer que nuestra máquina se mueva en círculo, en cuadrado o en la forma que nos de la gana.
Pero hay un problema
Si el robot o la máquina trabaja en un entorno controlado, como puede ser una impresora 3D, entonces podemos asumir que todo va a ir bien, y fiarnos de nuestro programa.
Pero no podemos estar 100% seguros. No sabremos si el robot se ha quedado bloqueado contra algún obstáculo o si ha tropezado con algún elemento situado en medio de su trayectoria.
Para eso necesitamos un dispositivo externo que nos informe de lo que está ocurriendo en cada momento.
👍🏻 Control de la velocidad
Además de la posición, nuestro programa puede controlar la velocidad a la que enviamos los pulsos. De esta forma, podemos decelerar y acelerar de forma controlada en todo momento, podemos controlar la inercia, y la frenada, para que los movimientos sean suaves y fluidos.
👍🏻 Fijar su posición
Una característica muy importante es que los motores paso a paso es que pueden quedar fijos en una posición. Pero si suministramos corriente a las bobinas, el motor mantendrá esta posición, sin mecanismos complicados. Esto nos permite, por ejemplo, levantar un peso y dejarlo firme en el aire, sin movimientos inesperados.
👍🏻 Máxima fuerza a baja velocidad
Los motores paso a paso no son como los motores eléctricos convencionales, al contrario: Tienen más fuerza cuando su movimiento comienza en reposo que cuando van a toda velocidad. Por eso, son una excelente opción cuando nuestro proyecto necesita poca velocidad, pero mucha fuerza (como en una máquina que corta tablones de madera, por ejemplo).
😵 ¿Qué problemas tienen los motores stepper?
No todo son ventajas, los motores paso a paso también tienen desventajas bastante importantes.
👎🏻 Son poco eficientes
Sí, los motores paso a paso derrochan bastante energía comparados con los motores eléctricos convencionales: consumen más amperios. Su máximo de corriente se da cuando están parados y por este motivo se suelen calentar bastante.
👎🏻 Son lentos
Para dar una vuelta completa el motor tiene que recorrer los 200 pasos, pasando por cada uno (norte-sur-norte-sur), en cambio un motor normal va a ir mucho más rápido. Si necesitas velocidad debes invertir dinero en un servomotor (son más caros) o hacerte un motor con un encoder.
💡 Un encoder es un dispositivo que permite conocer la posición real del motor.
👎🏻 Tiene poca fuerza en altas velocidades
Cuando están parados desarrollan mucha fuerza y les ocurre lo contrario cuando giran a gran velocidad.
👎🏻 Feedback
No tienen Feedback. Al contrario que los servomotores, los motores stepper no conocen su posición en tiempo real y no pueden corregirse (a no ser que añadas un sistema por tí mismo para hacer estas medidas y correcciones).
🛒 Qué tipos de motores stepper puedo comprar
No todos los motores son iguales, y por tanto, no todos los drivers son lo mismo, ni son compatibles, la diferencia fundamental entre ellos está en las bobinas que tiene el motor en su interior.
Por este motivo, debemos tener muy claro qué tipos de motores tenemos antes de comprar el driver y estos son los dos tipos de motores que puedes encontrarte:
☝🏻 Motores unipolares
Internamente tienen dos pares de bobinas y cada par se compone de dos bobinas. Una se magnetiza hacia el polo norte y otra hacia el polo sur. Son los motores más sencillos de programar.
En un momento inicial el driver permite que pase la corriente por la bobina que magnetiza hacia el polo norte y en el siguiente se alimenta la que magnetiza al polo sur, de esta forma, el driver sólo tiene que encender y apagar cada bobina cada vez.
🧨 Esto es lo más importante de los motores unipolares. El driver no entiende de norte y sur, sólo conecta y desconecta las bobinas. Aquí tenéis unos cuantos.
Un esquema de motor paso a paso unipolar de 8 cables:

Un esquema motor paso a paso unipolar de 6 cables.

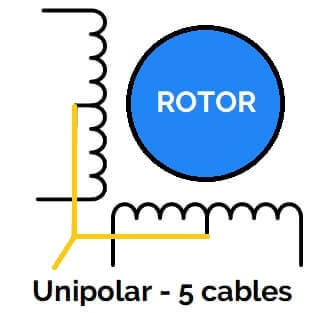
Y un esquema motor paso a paso unipolar de 5 cables. Las bobinas comparten un cable común que a su vez están unidos entre sí.
Normalmente los motores unipolares son más baratos y menos potentes. Los drivers para motores unipolares son muy sencillos (una matriz de transistores), y también más baratos.
La desventaja es que al ser tan simples no gestionan la potencia que envían al motor. El driver más conocido para este tipo de motores es el ULN2803, que es muy muy sencillo internamente.
💡 Si buscas algo barato y que no requiera hacer mucha fuerza una buena opción es un motor unipolar.
✌🏻 Motores bipolares
Los motores bipolares, internamente, son más sencillos que los motores unipolares ya que únicamente tienen 2 bobinas. Un ejemplo serían los Nema 17.

La complejidad de estos motores está en el driver, porque:
- Tiene que permitir pasar la corriente por la bobina
- Tiene que cambiar la polaridad de la corriente.
De esta forma, en un primer momento, la corriente viaja en una dirección, creando un campo magnético Norte/Sur y en el siguiente momento la dirección de la corriente se invierte, creando un campo magnético sur/norte.
Precisamente por eso se llaman bipolares, porque las bobinas están pensadas para cambiar de polaridad durante el movimiento.
Existen multitud de drivers para motores paso a paso, los más conocidos en el mundo de la impresión 3D y la robótica son los basados en:
- El chip Allegro A4988
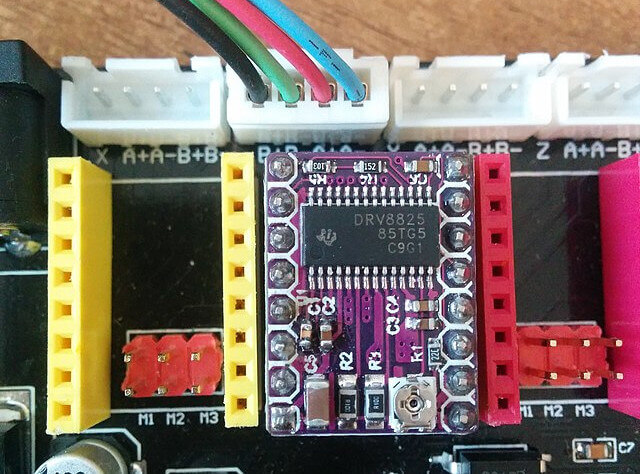
- El Texas Instruments DRV8825
- Los TMC2208/2209 de Trinamic Motion Control
Para los motores más grandes, que necesitan más potencia, se usan drivers más potentes y los más conocidos (y caros) son los Gecko. Este tipo de drivers los encuentras en las máquinas CNC.
🔎 En general, los motores bipolares son más potentes y son los más usados en las impresoras 3D, CNC, cortadoras, grabadoras láser etc. Además, como los drivers suelen ser más avanzados, gestionan mejor la potencia, e incluyen características más avanzadas, como micropasos, etc.
🛠️ Las 10 características principales de un motor paso a paso
Vamos a enumerar las características generales que podemos encontrar cuando buscamos motores paso a paso para comprar:
1️⃣ Número de pasos por vuelta
Los motores paso a paso no tienen un movimiento continuo, y por lo tanto, no pueden posicionarse en todos los ángulos. Funcionan como los segundos de un reloj de agujas, que sólo tienen 60 posiciones.
Por lo tanto cuantos más pasos tiene el motor, vamos a conseguir mayor precisión, pero menor velocidad. Los motores que usamos normalmente en máquinas y robótica suelen tener 200 pasos por vuelta, esto es:
360º/200 = 1.8º por cada paso.
2️⃣ Ángulo por paso
Esto es otra forma de conocer el número de pasos: Es lo mismo decir 200 pasos por vuelta, que 1.8º por paso.
3️⃣ Micro stepping
Dentro de las impresoras 3D hay placas (RAMPS, SKR, MKS etc…) que incorporan unos «jumpers» (pequeños conectores para puentear dos pines) para poder configurar el número de micropasos. La idea de esta técnica se basa en no enviar el 100% de la fuerza a los imanes, con esto conseguimos que el motor no complete el paso al 100%.
Los drivers que están pensados para micropasos envían la energía usando una onda sinusoidal. En teoría con esta técnica perdemos fuerza pero ganamos resolución y fluidez. Se nota bastante, si desactivas el microstepping (quitando los jumpers de la placa), los motores avanzan más bruscamente.
💡 Es una buena práctica configurar todas las máquinas que montes para que tengan la máxima resolución del driver (16 micropasos en el A4988, 32 micropasos en el DRV8825 o 256 en los TMC).

4️⃣ Reductora y Torque
Si al motor le conectamos un engranaje pequeño y lo engranamos a uno más grande, tenemos una reductora (muchos motores ya las incorporan de fábrica).

En el engranaje pequeño, la velocidad será mayor, pero el torque será menor, mientras que ocurrirá lo contrario en el traspaso de energía del grande, menor velocidad y mayor torque. Despreciando las pérdidas por fricción la potencia de entrada es la misma de la salida y ‘Torque’ es la fuerza multiplicada por el brazo de palanca (o, radio del engranaje).
💡 Las reductoras se explican en proporciones, se suele usar el número de dientes del engranaje, por ejemplo:
32:8 quiere decir que pasamos de un engranaje de 32 dientes a uno de 8 dientes, o que por cada 32 vueltas del primero el segundo engranaje va a girar 8 veces, o lo que es lo mismo, que la relación es de 32/8=4 veces menos.
El uso de reductoras depende mucho de la máquina, de la fuerza y de la velocidad que vayas a necesitar.
Por otro lado tenemos el Holding torque (en español, Momento de retención) que lo que mide es la fuerza con la que el motor puede aguantar un peso fijo.
Para medirlo, imagina que tenemos un palo de 1 metro de longitud, y en la punta ponemos un peso de 1 Kg. Ahora tenemos que levantar ese palo con una sola mano. Muchos no podrán hacerlo por no tener suficiente fuerza.
Ahora imaginemos que en lugar de 1Kg, tenemos 2Kg. ¡La cosa se complica aún más!. Pues ahora imaginemos que en lugar de un bastón de 1 metro, tenemos un bastón de 5 metros, y 500 gramos.
Aunque el peso sea menor, ¡levantar medio kilo a 5 metros de distancia con un solo brazo es muy difícil!, por eso medimos el torque en Newtons por metro, porque depende del peso y de la distancia del peso al eje del motor.
Las impresoras 3D suelen necesitar mucho torque en el extrusor para empujar el filamento. Para hacernos una idea sin reductora, un extrusor es capaz de crear una fuerza de 40 Newtons por centímetro, en cambio, un grabador láser no tiene que empujar nada y no necesita apenas torque.
Los motores paso a paso suelen tener menos torque que los motores DC (de corriente continua), pero tienen la ventaja de que es más sencillo mantenerlos firmes en una posición. Para que un motor de corriente continua se mantenga fijo en un lugar hay que recalcular la posición en un bucle permanente.
5️⃣ Tamaño y estándar NEMA
Continuamente escucharás Nema 16, Nema23… NEMA es el acrónimo de National Electrical Manufacturers Association.
En concreto nos dice el tamaño de la cara frontal (donde están los orificios de los tornillos). NEMA17 significa que mide 1.7 x 1.7 pulgadas. En general más tamaño suele implicar más torque, pero no tiene porqué ser así y es perfectamente posible que un NEMA14 supere a un NEMA17, depende del fabricante y de las características del motor.
Si el motor va a ser instalado en una parte móvil de la máquina, como el cabezal, entonces el tamaño sí que importa: Más grande implica más peso y por tanto más inercia. Nos va a costar más mover el cabezal, o la impresora 3D.
Los motores NEMA14 son ligeros pero es difícil encontrarlos con la fuerza necesaria. Los NEMA17 son los motores más sencillos de conseguir y son los más comunes en los proyectos de Arduino.
🔎 Si tienes dudas de que nema 17 coger, coge siempre el más grande. Si tienes miedo a que no te llegue la potencia del motor debes de coger uno de los grandes, de 70[oz].
6️⃣ Calor
Ten en cuenta que los motores se calientan bastante. Si trabajan al tope de su capacidad no es difícil que lleguen a los 80º grados y si utilizaremos piezas de plástico tipo PLA para tu máquina ¡Esto puede ser un problema!.
Un ejemplo: imaginemos que encontramos un motor NEMA14 que funciona con el torque necesario pero como será llevado al límite se va a calentar mucho. En este caso, si vamos a fijarlo usando piezas de PLA tendremos que tener esto en cuenta o usar un NEMA17 que trabajará más cómodamente y no va a calentarse tanto.
7️⃣ Resistencia
Entre las especificaciones del motor está la resistencia interna, ¿en qué afecta?: Por un lado está el calor que se desprende, al tener más resistencia, el motor se calienta más (efecto Joule).
Por otro lado, si la resistencia es alta, es posible que no permita circular la suficiente corriente para que el motor se mueva (este problema es más grave cuando usamos motores a más voltaje como 24v o 36V).
8️⃣ Voltaje
Este valor es motivo de confusión: Es común que el motor tenga un valor del tipo 3.6V y nuestra fuente de alimentación es de 12Vcc… ¿qué hay que hacer?
El motor no deja de ser una bobina de cobre y el valor del voltaje es una forma de indicar los amperios, porque la resistencia es constante. Por la Ley de Ohm, si la resistencia es constante, los amperios son proporcionales al voltaje.
En los motores más sencillos, como los unipolares, donde los drivers únicamente dejan pasar la corriente es importante que no pase demasiado voltaje o el motor se sobrecalentará, pero en los motores bipolares, en los que lo más normal es que usemos drivers avanzados, que gestionan correctamente la energía y tienen un límite máximo de potencia. El driver mide cuanta corriente pasa, y limita cuando cuando sobrepasamos el límite.
Por eso, en estos casos, el voltaje no nos interesa, ya que gestionaremos la potencia calibrando el driver.
No es lo mismo el voltaje máximo del motor, que el voltaje del driver.
9️⃣ Constante de tiempo
Debemos tener en cuenta el tiempo de carga de las bobinas y el motor PaP funciona cargando una bobina con un campo eléctrico, que a su vez, genera un campo magnético. Las bobinas no se cargan instantáneamente, tardan un tiempo.
A este parámetro lo denominamos constante de tiempo.
En concreto, representamos el tiempo que tardamos en cargar la bobina al 63.2% de su capacidad. ¿Por qué este número particular? Porque la carga de una bobina es exponencial, al principio cuesta, pero luego, avanza de forma más rápida.
Si representamos la carga en función del tiempo obtenemos estos valores donde 𝜏 es la constante de tiempo:

Pero lo que nos importa es que este valor debe ser lo más bajo posible si necesitamos velocidad en nuestro motor.
🔟 Tipos de eje del motor paso a paso
Hay 3 tipos principalmente.
- Eje circular. El más habitual.
- Eje con muesca. Es circular pero se ha practicado una planicie hasta formar una cara, de esta forma puede usarse un tornillo prisionero más fácilmente.
- Con husillo integrado. Ya que es muy común conectar un husillo al motor, hay motores que incorporan un husillo para conectar una tuerca. Incluso es posible pedir los husillos a medida.

Dentro de estas variantes hay modelos un poco más exóticos, por ejemplo, hay motores de eje huecos y pueden ser usados para rotar piezas y pasar los cables por el interior del eje del motor. Los hay que mueven un husillo en su interior (reciben el nombre de «non captive» en inglés) y con su uso pueden solucionarte muchos problemas diseño.

🧱 Guía práctica para identificar o cablear tu motor paso a paso
Hemos adquirido un motor paso a paso, el manual está en otro idioma y desconocemos si es unipolar o bipolar. En un simple vistazo:
- Si tiene 8 cables, probablemente sea unipolar y usará 4 por cada bobina.
- Si tiene 6 cables, probablemente sea unipolar y usará 3 para una bobina y 3 para la otra. Esto significa que cada bobina tiene su propio cable común.
- Si tiene 5 cables, probablemente sea unipolar y usará 2 para una bobina, 2 para la otra bobina, y uno para el común de ambas bobinas.
- Si tienes 4 cables, probablemente sea un motor bipolar y usará con 2 cables por cada bobina.
Ahora, vamos a centrarnos en los de 4 cables que son los más típicos que se usan en las impresoras 3D y en general
🏎️ Cableando los motores paso a paso: Versión hiper-rápida
Si el motor posee cables de diferentes colores suelen usarse en el orden Rojo / Azul / Verde / Negro.
🛑 Problema: ¡No está garantizado que sea así!
Es difícil saber dónde han conseguido los motores, como se han montado, etc. Hay personas que no son capaces de hacer que sus motores funcionasen, y al final descubrieron que el problema estaba en el cableado de los motores.
🚲 Cableando los motores paso a paso: Versión más larga
La mayoría de los drivers usados en impresoras 3D y máquinas domésticas son bipolares como los conocidos Pololu a4988, o los DRV8825. El motor posee 4 cables, 2 por cada bobina. Lo importante es descubrir cuáles pertenecen a cada una de las 2 bobinas.
🔎 Si deseamos cablear un motor paso a paso es necesario descubrir qué cables pertenecen a cada bobina.
Es necesario diferenciar cada bobina, por ejemplo, podemos distinguir la bobina A y la bobina B, también podemos nombrarlas como bobina 1 y bobina 2. Si observamos la leyenda del driver, los DRV8825 etiqueta A2, A1, B1, y B2 y los A4988 etiqueta como 1B, 1A, 2A, y 2B.
🚦 Si tienes un polímetro
Es un proceso muy sencillo: Comprueba la resistencia entre 2 cables cualquiera, si hay un poco de resistencia (menos de 150ohm), entonces hemos encontrado una bobina. Si la resistencia es infinita (suele indicarse como 0L en el polímetro) significa que los cables no están conectados entre si y pertenecen a bobinas distintas.
🚥 Si no tienes un polímetro
En este caso hay un método muy «llamativo» usando un LED con patillas: Simplemente debemos conectar un cable del motor a una patilla del LED, y otro cable del motor a la otra patilla.
Si giramos el eje del motor manualmente generamos una corriente al hacerlo. Si el LED enciende, has encontrado una bobina. Es importante girar el motor en una dirección y en la otra ya que el LED se encenderá solo en una dirección (cuando generamos la corriente desde el polo positivo al negativo). Si no enciende en ninguna dirección entonces ese par de cables pertenece a bobinas distintas.
🧮 Entonces ¿Afecta el orden de los pares de las Bobinas?
Con el polímetro o con los LEDs es posible localizar los pares de las bobinas, pero ahora surge la duda del orden, por ejemplo, Rojo/ Azul es el par de la bobina, pero ¿es lo mismo que Azul / Rojo? La respuesta es que que sí. Cambiará el orden de giro, Rojo/ Azul girará en un sentido, y Azul/Rojo girará al contrario. Al cambiar una de las bobinas ya invertimos el orden de giro.
💙 Conclusión final sobre los motores paso a paso
Si has llegado hasta aquí, es que realmente te preocupa conocer qué motores paso a paso necesitas para tu proyecto.
Los motores paso a paso son una parte fundamental de la electrónica de control, son el componente principal de muchos proyectos y por eso es importante conocerlos bien.
Espero que en este post sirva para sacar algunas conclusiones necesarias o que haya servido para aprender más sobre cómo funcionan interiormente y entender mejor cómo pueden ser usados.
Lo dicho, enhorabuena por llegar hasta aquí y a seguir frikeando.
Un abrazooooooooooooooooooooo 😮😮😮😮😮😮





